국내외 과학기술정책에 대한 주요 정보

주요동향
주요동향
일본 자동차 기업, 자율주행・eVTOL 등 모빌리티 영역 확장 원문보기 1
- 국가 일본
- 생성기관 Honda
- 주제분류 핵심R&D분야
- 원문발표일 2021-09-30
- 등록일 2021-10-15
- 권호 200
□ (도요타) 자율주행 자회사 설립 후 공격적 투자 가속페달
º 인공지능 기술을 보유한 미래 이동수단 개발 등 자율주행 사업에 집중하기 위해 올 1월 자회사 우븐 플래닛(Woven Planet Holdings) 설립 후 공격적 투자 단행
- 우븐 플래닛은 ‘사랑스런 이동수단, 생활 안전성(Mobility to Love, Safety to Live)’이라는 자율주행차 비전을 실현하기 위해 세계에서 가장 잘 프로그래밍되는 차량을
만드는 것이 목표
- 즉, 안전과 보안에 영향을 주지 않으면서 차량 SW 개발을 단순화하고 배치 빈도를 높여 모든 사람에게 차량 프로그래밍을 개방하는 것
- 출범 9개월 만에 세 번째 자율주행 관련 기업을 인수하며 기술력 확보에 박차
º (#1) 리프트의 자율주행차 사업부 ‘레벨5’를 현금 5억 5,000만 달러에 인수 완료(7.20)
※ 리프트는 코로나19 팬데믹 기간 동안 사회적 거리두기 등으로 핵심 사업인 차량공유 서비스 사업에서 큰 손실을 입었고 이후 전체 사업을 재정비하는 과정에서 자율주행
사업 매각 결정
- 도요타는 자율주행 사업 부문에서 선제적으로 차량공유 서비스 업체를 차단하며 경쟁우위를 점하고 종합 모빌리티 서비스 확립 시기를 앞당기겠다는 방침
- 우븐 플래닛은 레벨5가 축적한 10만 건 이상 자율주행 기록을 인계받을 뿐 아니라 향후에도 리프트가 차량공유를 통해 축적하는 자율주행 기록을 지속적으로 제공받는데 합의
º (#2) 고화질(HD) 지도 제작회사인 카메라(CARMERA, Inc.) 인수 완료(8.18)
- 카메라는 이미 오랫동안 도요타와 신뢰를 쌓아온 파트너로 뉴욕・시애틀에 위치한 카메라 사무실 및 사업을 즉시 이어받는 데 합의
※ 2018년부터 도요타 연구소(Toyota Research Institute-Advanced Development) 와 협력해 HD 지도 구축 및 업데이트 프로젝트 공동 진행
- 카메라는 우븐 플래닛의 AMP(Automated Mapping Platfrom) 팀으로 통합돼 개방형 SW 플랫폼 우븐 시티(Woven City)* 및 아린(Arene) 같은 혁신 프로젝트를
인큐베이팅할 예정
* 우븐 시티: 도요타 자동차가 로봇공학・자율주행・인공지능 등 첨단기술을 접목해 건설 중인 스마트시티로 시즈오카현 스소노市에 위치
- 지도 업데이트 및 변경 사항 관리 등에서 우수한 기술력을 가지고 있는 만큼, 우븐 플래닛이 개발한 정밀 지도 플랫폼을 보완하고 확장 가능
- 합류 도로와 차선을 포함한 글로벌 규모의 정밀 지도 플랫폼으로 발전을 가속화해 각 지역에 적합한 정확・정밀 지도 보급을 확대하며 안전한 자율주행 지원
º (#3) 미국 자동차용 소프트웨어 개발업체인 레노보 모터스 인수 발표(9.28)
- 인적 자원과 노하우를 습득하고 SW 개발을 가속화해 우븐 플래닛의 비전인 ‘Mobility to Love, Safety to Live’ 실현과 개방형 차량 플랫폼 아린(Arene) 개발을 강화하는 것이
목표
- 2010년 실리콘밸리에 설립한 레노버 모터스가 강점을 지닌 차량 상태와 고객 데이터를 분석하고 차량 설계에 반영하는 SW 기술을 적극 활용 예상
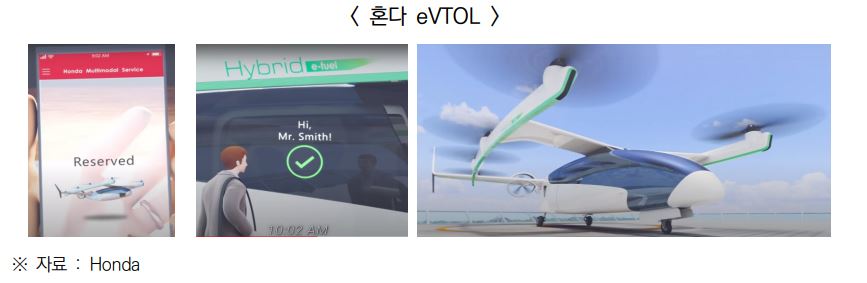
□ (혼다) 전동수직 이착륙기(eVTOL)에서 소형 로켓까지 미래 신사업 청사진 발표(9.30)
º 자동차・제어 및 로봇공학 분야 기술을 포함해 혼다가 축적한 핵심 기술을 종합적으로 활용해 기존 영역에서 더욱 진전된 새로운 분야로의 도전 선언
- 기존 자동차 사업의 견고함을 추구하면서 환경오염 제로 사회, 교통사고 제로 사회 실현 등 환경과 안전을 고려한 선행기술연구와 시간과 공간에 얽매이지 않는 이동수단,
나아가 새로운 가치를 제공하는 독창적인 기술연구 진행
º (#1) 하늘을 나는 자동차인 ‘전기수직이착륙(eVTOL) 항공기’ 개발하며 도심항공 모빌리티 사업 속도
- eVTOL 시장이 향후 30조 엔 규모로 성장할 것으로 예상하며 2030년대에는 하이브리드 기술을 접목해 장거리 비행이 가능한 eVTOL를 상용화할 계획
- 혼다기술연구소가 개발하고 있는 eVTOL은 가스터빈과 전기 배터리를 결합한 하이브리드 형태로 항속거리가 400km 이상으로 도시 간 이동도 가능할 전망
- 하이브리드 방식을 선택한 것은 아직 비행 거리 제약이 따르는 순수 전기 배터리 기술 개발 속도를 감안한 것
º (#2) 가상 이동을 가능하게 하는 ‘아바타 로봇’ 개발
- 시간・장소・공간 제약없이 인간의 능력 범위를 확장할 수 있는 아바타 로봇 실증 테스트를 2024년 3월까지 완료하고 2030년대에는 상용화한다는 목표
- 이미 사람의 삶을 제약 없이 더욱 즐겁게 만들기 위해 2족 보행 로봇 아시모 연구와 개발 등 로봇 연구에서 경험 보유
- 차세대 로봇공학 일환으로 개발 중인 독창적인 아바타 로봇은 원격으로 물건을 다루는 현실감, 사용자가 현장에 없어도 작업을 수행하고 사물을 경험하며 제2의 ‘나’처럼
행동할 수 있는 것이 특징
- 이러한 아바타 로봇 구현의 핵심 기술은 인공지능 기반 원격 제어 기능을 활용해 개발한 다지 로봇 손으로, 인공지능이 지원하는 직관적인 사용자 제어를 기반으로
복잡한 작업을 빠르고 정확하게 수행하며 인간이 사용하도록 설계한 도구를 최대한 활용 가능
- 현재 손가락 끝으로 작은 물체를 섬세하게 집는 능력과 단단한 항아리 뚜껑을 사람 손 수준으로 여는 힘을 갖춘 기술을 개발하였으며, 여러 손가락을 사용하여 일련의
동작으로 물체를 부드럽게 잡고 힘을 정밀하게 제어하여 도구를 다룰 수 있도록 발전시켜나갈 계획

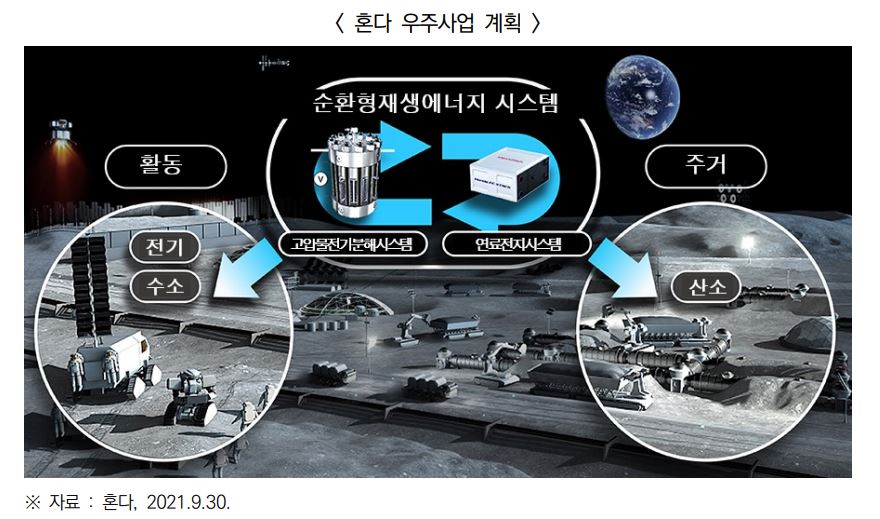
º (#3) 재생에너지 인프라, 우주에서 작업을 수행할 수 있는 인공지능 원격 제어 로봇, 재활용이 가능한 로켓 등 제시하며 우주사업 진출 표명
※ NTT데이터 경영연구소에 따르면 2040년 세계 우주산업 시장은 약 120조 엔 규모로 향후 20년 간 약 3배에 달하는 비약적인 성장 예상
- 재생에너지 인프라 구축을 위해 수소연료전지 기술을 활용하고 일본우주항공연구개발기구(JAXA)와 파트너십을 체결해 달 표면을 구축할 탐사 기지의 에너지 자급 방안
등을 연구할 방침
- 그 동안 축적한 연료전지기술과 고압물전기분해기술을 기반으로 달의 순환형 재생 에너지 시스템 구축 목표
- 달에서 얼음 등 물의 흔적 일부가 남아있을 가능성을 감안해 물을 활용한 발전 계획도 검토해 궁극적으로 달에 사람이 거주할 수 있는 환경을 마련한다는 구상
- 2023년 달 극지방 탐사를 추진하고 2024년에는 JAXA와 함께 화성 탐사선까지 보낼 계획
- 또한 우주에서 각종 작업을 수행하기 위해 인공지능 원격 제어 기능과 토크 제어 기술을 활용용해 섬세한 작업까지 수행하는 로봇 연구도 진행
- 이와 관련한 제반 연구사항을 종합적으로 검토・진행하여 2024년부터 프로토타입 테스트를 시작하고 2030년 상용화할 방침
- 통신・지구관측 가능한 소형 인공위성 개발도 진행하고 있는데 로켓 구성 요소 일부를 다시 지구로 귀환시켜 부품을 재활용하는 방식 연구
- 이에 더해 자율주행과 자동항법장치(GPS) 관련 기술을 접목해 발사체 안전성도 높일 계획